Automatic self parking smart car
Block Diagram

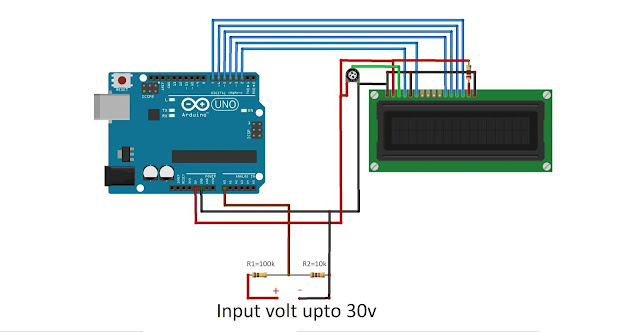
Circuit Diagram

Main.h
| #ifndef MAIN_H | |
| #define MAIN_H | |
| #include "includes.h" | |
| #define PARKING_DEPTH 0.16 /* in Meters */ | |
| #define ITERATIONS 250 | |
| #define PARKING_DISTANCE 40 /* in Centimeters */ | |
| struct App { | |
| volatile char AutoPark :1; | |
| volatile char Moni :1; | |
| volatile char Door :1; | |
| volatile char Alco :1; | |
| volatile char DispDoor :1; | |
| volatile char DispAlco :1; | |
| volatile char Back :1; | |
| volatile char Front :1; | |
| volatile char Obstacle :1; | |
| volatile char FrontObstacle :1; | |
| volatile char Parked :1; | |
| }; | |
| //DEFINE FUNCTION PROTOTYPE | |
| static void Init (void); | |
| static void inittest (void); | |
| static void DispTitle (void); | |
| static void CheckAlco (void); | |
| static void ChkDoor (void); | |
| static void EXTINTinit (void); | |
| static void Tmr2Init (void); | |
| static int8u AutoPark (void); | |
| static void ParkVehicle (void); | |
| static void Unpark (void); | |
| #endif |
| #ifndef _APP_H | |
| #define _APP_H | |
| /************* LCD CONFIGURATION ****************/ | |
| #define LCD_DDR DDRC | |
| #define LCD_DATA_PORT PORTC | |
| #define LCD_ENABLE_PIN PC3 | |
| #define LCD_REGISTER_SELECT_PIN PC2 | |
| #define DISPLAY_INIT 1 | |
| #define LCD_NSCRL 1 | |
| #define FLOAT_T0_STRING 1 | |
| #define DECIMAL_PRECISION 100 | |
| /******** LCD CONFIGURATION ENDS ****************/ | |
| /******** BUZZER: CONFIGURATION ****************/ | |
| #define BUZ_DDR DDRC | |
| #define BUZ_PORT PORTC | |
| #define BUZ_PIN PC1 | |
| #define OFF_TIME 100 | |
| /******** BUZZER CONFIGURATION ENDS ************/ | |
| /********* LED: CONFIGURATION ******************/ | |
| #define LED_DDR DDRC | |
| #define LED_PORT PORTC | |
| #define LED_PIN PC0 | |
| #define OFF_TIME 100 | |
| /******** LED CONFIGURATION ENDS *************/ | |
| /******** MOTOR CONFIGURATION *************/ | |
| #define MOT_PORT PORTA | |
| #define MOT_DDR DDRA | |
| #define M1_AN PA3 | |
| #define M1_CA PA4 | |
| #define M2_AN PA5 | |
| #define M2_CA PA6 | |
| /******** MOTOR CONFIGURATION ENDS *********/ | |
| /***** SERVO MOTOR CONFIGURATION *********/ | |
| #define SERVO_DDR DDRD | |
| #define SERVO_PORT PORTD | |
| #define SERVO1 PD5 | |
| /***** SERVO MOTOR CONFIGURATION END *****/ | |
| /******* ALCOHOL SENSOR CONFIG *********/ | |
| #define ALSENS_DDR DDRD | |
| #define ALSENS_PORT PORTD | |
| #define ALSENS_PPIN PIND | |
| #define ALSENS_PIN PD2 | |
| /************************************/ | |
| /******* DOOR SENSOR CONFIG *********/ | |
| #define DOOR_SENS_PORT PORTD | |
| #define DOOR_SENS_DDR DDRD | |
| #define DOOR_SENS_PPIN PIND | |
| #define DOOR_SENS_PIN PD7 | |
| /************************************/ | |
| /******* ULTRASONIC SENSOR PIN DEFINITION *******/ | |
| #define ULTSEN_DDR DDRA | |
| #define ULTSEN_PORT PORTA | |
| #define ULTSEN_PIN PINA | |
| #define TRIG_PIN PA1 | |
| #define ECHO_PIN PA0 | |
| /*****************************************/ | |
| /******* IR SENSOR PIN DEFINITION ******/ | |
| #define IR_SENS_DDR DDRD | |
| #define IR_SENS_PORT PORTD | |
| #define IR_SENS_PPIN PIND | |
| #define IR_SENS1_PIN PD4 | |
| #define IR_SENS2_PIN PD6 | |
| #define IR_SENSORS_2 | |
| /**************************************/ | |
| /*********** EXTERNAL INTERRUPT PINS *************/ | |
| #define INTDDR DDRD | |
| #define INTPORT PORTD | |
| #define INTPIN PIND | |
| #define INT1_PIN PD3 | |
| /**********************************************/ | |
| #endif |
Code
| #include"main.h" | |
| static struct App Flags; | |
| int main(void) { | |
| Init(); | |
| while (TRUE) { | |
| if (Flags.Moni) { | |
| CheckAlco(); | |
| ChkDoor(); | |
| MeasDist(0xcc); | |
| Flags.Moni = FALSE; | |
| } | |
| if (Flags.AutoPark) { | |
| beep(1,150); | |
| if (Flags.Parked) | |
| Unpark(); | |
| else | |
| AutoPark(); | |
| Flags.AutoPark = FALSE; | |
| } | |
| sleep_cpu(); | |
| } | |
| return 0; | |
| } | |
| static void Init(void) { | |
| buzinit(); | |
| ledinit(); | |
| beep(2,100); | |
| lcdinit(); | |
| IRSensInit(); | |
| AlcoSensInit(); | |
| DoorSensInit(); | |
| MotInit(); | |
| servoinit(); | |
| ultinit(); | |
| Tmr2Init(); | |
| EXTINTinit(); | |
| inittest(); | |
| DispTitle(); | |
| sei(); | |
| sleep_enable(); | |
| sleep_cpu(); | |
| } | |
| static void DispTitle(void) { | |
| lcdclr(); | |
| lcdws("Auto Parking Veh"); | |
| lcdr2(); | |
| lcdws("Distance:"); | |
| } | |
| static int8u AutoPark(void){ | |
| int8u ParkDist = 0; | |
| int16u Count = 0; | |
| Flags.Parked = FALSE; | |
| lcdclrr(1); | |
| lcdws("Find'g Par Space"); | |
| Front(); | |
| lcdclrr(0); | |
| while (++Count < ITERATIONS) { | |
| if (MeasDist(0x80) > PARKING_DEPTH) { | |
| if(++ParkDist > PARKING_DISTANCE) { | |
| ParkVehicle(); | |
| Flags.Parked = TRUE; | |
| return 1; | |
| } | |
| dlyms(100); | |
| } else | |
| ParkDist = 0; | |
| lcdwint(0x88, ParkDist); | |
| lcdwint(0x8c,Count); | |
| } | |
| lcdclrr(1); | |
| lcdws("No Parking Dist"); | |
| MotStop(); | |
| beep(3,150); | |
| dlyms(1000); | |
| DispTitle(); | |
| } | |
| static void ParkVehicle(void) { | |
| int8u i; | |
| lcdclr(); | |
| lcdws(" Distance Found"); | |
| beep(2,150); | |
| Front(); | |
| dlyms(4000); | |
| MotStop(); | |
| lcdr2(); | |
| lcdws(" Parking."); | |
| Flags.Back = TRUE; | |
| Strt2Left(); | |
| Back(); | |
| i = 0; | |
| while (i < 100) { | |
| if (!Flags.Obstacle) { | |
| Back(); | |
| i++; | |
| } else | |
| MotStop(); | |
| dlyms(55); | |
| } | |
| Left2Strt(); | |
| Strt2Right(); | |
| i = 0; | |
| while (i < 100) { | |
| if (!Flags.Obstacle) { | |
| Back(); | |
| i++; | |
| } else | |
| MotStop(); | |
| dlyms(55); | |
| } | |
| MotStop(); | |
| Right2Strt(); | |
| Mot1Aclk(); | |
| dlyms(750); | |
| MotStop(); | |
| lcdclr(); | |
| lcdws("*****Parked*****"); | |
| Flags.Back = FALSE; | |
| beep(3,150); | |
| dlyms(2000); | |
| DispTitle(); | |
| } | |
| static void Unpark(void) { | |
| int8u i; | |
| lcdclr(); | |
| lcdws(" Unparking"); | |
| Back(); | |
| dlyms(750); | |
| MotStop(); | |
| Strt2Right(); | |
| Flags.Front = TRUE; | |
| i = 0; | |
| while (i < 100) { | |
| if (!Flags.FrontObstacle) { | |
| Front(); | |
| i++; | |
| } else | |
| MotStop(); | |
| dlyms(47); | |
| } | |
| Right2Strt(); | |
| Strt2Left(); | |
| i = 0; | |
| while (i < 100) { | |
| if (!Flags.FrontObstacle) { | |
| Front(); | |
| i++; | |
| } else | |
| MotStop(); | |
| dlyms(40); | |
| } | |
| Left2Strt(); | |
| dlyms(2000); | |
| MotStop(); | |
| lcdclr(); | |
| lcdws("****UNPARKED****"); | |
| Flags.Parked = FALSE; | |
| Flags.Front = FALSE; | |
| beep(3,150); | |
| dlyms(2000); | |
| DispTitle(); | |
| } | |
| static void inittest(void) { | |
| lcdclr(); | |
| lcdws("Chk Alcol:"); | |
| if (ReadAlco()) { | |
| lcdws(" NOT OK"); | |
| while (ReadAlco()) { | |
| beep(1,100); | |
| dlyms(2000); | |
| } | |
| } else { | |
| lcdws(" OK"); | |
| dlyms(1000); | |
| } | |
| lcdclr(); | |
| lcdws("Chk Doors:"); | |
| if (DoorRead()) { | |
| lcdws(" NOT OK"); | |
| while (DoorRead()) { | |
| beep(1,100); | |
| dlyms(2000); | |
| } | |
| } else { | |
| lcdws(" OK"); | |
| dlyms(1000); | |
| } | |
| } | |
| static void Tmr2Init(void) { | |
| TCNT2 = 0; | |
| TIMSK |= _BV(TOIE2); /* ENABLE OVERFLOW INTERRUPT */ | |
| TCCR2 |= _BV(CS22) | _BV(CS21) | _BV(CS20); /* PRESCALAR BY 1024 */ | |
| } | |
| /* overflows at every 32msec */ | |
| ISR(TIMER2_OVF_vect) { | |
| static int8u i, j, k, l; | |
| TCNT2 = 0; | |
| if (++i >= 156) i = 0; | |
| switch(i) { | |
| case 0: case 6: ledon(); break; | |
| case 3: case 9: ledoff(); break; | |
| } | |
| if (!Flags.Moni && ++j >= 31) { | |
| Flags.Moni = TRUE; | |
| j = 0; | |
| } | |
| if (Flags.Alco || Flags.Door) { | |
| if (++k >= 94) | |
| k = 0; | |
| switch (k) { | |
| case 0: case 6: buzon(); break; | |
| case 3: case 9: buzoff(); break; | |
| } | |
| } | |
| if (Flags.Back) { | |
| if (BackIRRead()) | |
| Flags.Obstacle = TRUE; | |
| else | |
| Flags.Obstacle = FALSE; | |
| if (++l >= 31) | |
| l = 0; | |
| switch (l) { | |
| case 0: case 6: buzon(); break; | |
| case 3: case 9: buzoff(); break; | |
| } | |
| } | |
| if (Flags.Front) { | |
| if (FrntIRRead()) | |
| Flags.FrontObstacle = TRUE; | |
| else | |
| Flags.FrontObstacle = FALSE; | |
| } | |
| } | |
| static void EXTINTinit(void) { | |
| INTDDR &= ~_BV(INT1_PIN); | |
| INTPORT |= _BV(INT1_PIN); | |
| GICR |= _BV(INT1); //ENABLE EXTERNAL INTERRUPT | |
| MCUCR |= _BV(ISC11); //FALLING EDGE INTERRUPT | |
| } | |
| ISR(INT1_vect) { | |
| Flags.AutoPark = TRUE; | |
| GICR |= _BV(INT1); | |
| } | |
| static void CheckAlco(void) { | |
| if (ReadAlco()) { | |
| if (!Flags.DispAlco) { | |
| Flags.DispAlco = TRUE; | |
| lcdclrr(1); | |
| lcdws("Alcohol Consumed"); | |
| Flags.Alco = TRUE; | |
| } | |
| }else { | |
| if (Flags.DispAlco) { | |
| Flags.Alco = FALSE; | |
| Flags.DispAlco = FALSE; | |
| buzoff(); | |
| DispTitle(); | |
| } | |
| } | |
| } | |
| static void ChkDoor(void) { | |
| if (DoorRead()) { | |
| if (!Flags.DispDoor) { | |
| Flags.DispDoor = TRUE; | |
| lcdclrr(1); | |
| lcdws("Door Opened"); | |
| Flags.Door = TRUE; | |
| } | |
| }else { | |
| if (Flags.DispDoor) { | |
| Flags.Door = FALSE; | |
| Flags.DispDoor = FALSE; | |
| buzoff(); | |
| DispTitle(); | |
| } | |
| } | |
| } |


Comments
Post a Comment