how to make automatic dual axis solar tracker using arduino
Homemade dual axis solar tracker

Hello and welcome to the RC Invention projects. In this article, you will learn to make a dual axis solar tracker using Arduino, servo motor and LDR. Ingoing to use some this poject, we are use some light sensitive sensors like LDR to track the sunlight and direct the solar panel towards the sun that increase its efficiency
Components required for this projects.
1. Arduino Uno or Nano.
2. servo motor (2nos).
3. LDR (Light Depending Resistor).
4. Resistor ( 1k to 10k ohm ) any one.
5. Solar panel .
6. PVC sheet .
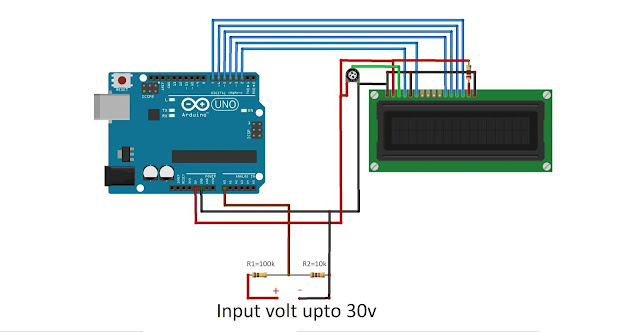
Circuit Diagram
Arduino Code - 01
#include <Servo.h>
// 180 horizontal MAX
Servo horizontal; // horizontal servo
int servoh = 180; // 90; // stand horizontal servo
int servohLimitHigh = 180;
int servohLimitLow = 65;
// 65 degrees MAX
Servo vertical; // vertical servo
int servov = 45; // 90; // stand vertical servo
int servovLimitHigh = 120;
int servovLimitLow = 15;
// LDR pin connections
// name = analogpin;
int ldrlt = 0; //LDR top left - BOTTOM LEFT <--- BDG
int ldrrt = 1; //LDR top rigt - BOTTOM RIGHT
int ldrld = 2; //LDR down left - TOP LEFT
int ldrrd = 3; //ldr down rigt - TOP RIGHT
void setup()
{ Serial.begin(9600);
// servo connections
// name.attacht(pin);
horizontal.attach(9);
vertical.attach(10);
horizontal.write(180);
vertical.write(45);
delay(3000);
}
void loop()
{ int lt = analogRead(ldrlt); // top left
int rt = analogRead(ldrrt); // top right
int ld = analogRead(ldrld); // down left
int rd = analogRead(ldrrd); // down right
// int dtime = analogRead(4)/20; // read potentiometers
// int tol = analogRead(5)/4;
int dtime = 10; int tol = 50;
int avt = (lt + rt) / 2; // average value top
int avd = (ld + rd) / 2; // average value down
int avl = (lt + ld) / 2; // average value left
int avr = (rt + rd) / 2; // average value right
int dvert = avt - avd; // check the diffirence of up and down
int dhoriz = avl - avr;// check the diffirence og left and rigt
Serial.print(avt);
Serial.print(" ");
Serial.print(avd);
Serial.print(" ");
Serial.print(avl);
Serial.print(" ");
Serial.print(avr);
Serial.print(" ");
Serial.print(dtime);
Serial.print(" ");
Serial.print(tol);
Serial.println(" ");
if (-1*tol > dvert || dvert > tol) // check if the diffirence is in the tolerance else change vertical angle
{
if (avt > avd)
{
servov = ++servov;
if (servov > servovLimitHigh)
{
servov = servovLimitHigh;
}
}
else if (avt < avd)
{
servov= --servov;
if (servov < servovLimitLow)
{
servov = servovLimitLow;
}
}
vertical.write(servov);
}
if (-1*tol > dhoriz || dhoriz > tol) // check if the diffirence is in the tolerance else change horizontal angle
{
if (avl > avr)
{
servoh = --servoh;
if (servoh < servohLimitLow)
{
servoh = servohLimitLow;
}
}
else if (avl < avr)
{
servoh = ++servoh;
if (servoh > servohLimitHigh)
{
servoh = servohLimitHigh;
}
}
else if (avl = avr)
{
// nothing
}
horizontal.write(servoh);
}
delay(dtime);
}
Arduino Code - 02
int topleft;
int topright;
int downleft;
int downright;
int waittime = 1;
void setup() {
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
TCCR1A = 0;
TCCR1A = (1 << COM1A1) | (1 << COM1B1) | (1 << WGM11);
TCCR1B = 0;
TCCR1B = (1 << WGM13) | (1 << WGM12) | (1 << CS11);
ICR1 = 40000;
OCR1A = 3000;
OCR1B = 3600;
}
void loop() {
topleft = analogRead(A0);
topright = analogRead(A1);
downleft = analogRead(A2);
downright = analogRead(A3);
if (topleft > topright) {
OCR1A = OCR1A + 1;
delay(waittime);
}
if (downleft > downright) {
OCR1A = OCR1A + 1;
delay(waittime);
}
if (topleft < topright) {
OCR1A = OCR1A - 1;
delay(waittime);
}
if (downleft < downright) {
OCR1A = OCR1A - 1;
delay(waittime);
}
if (OCR1A > 4000) {
OCR1A = 4000;
}
if (OCR1A < 2000) {
OCR1A = 2000;
}
if (topleft > downleft) {
OCR1B = OCR1B - 1;
delay(waittime);
}
if (topright > downright) {
OCR1B = OCR1B - 1;
delay(waittime);
}
if (topleft < downleft) {
OCR1B = OCR1B + 1;
delay(waittime);
}
if (topright < downright) {
OCR1B = OCR1B + 1;
delay(waittime);
}
if (OCR1B > 4200) {
OCR1B = 4200;
}
if (OCR1B < 3000) {
OCR1B = 3000;
}
}


Comments
Post a Comment